Технології інтеграції SCADA/HMI з іншими системами
Взаємодія SCADA/HMI з контролерами та розподіленою периферією
Для доступу до даних рівня керування процесом (рівень 2, контролери, розподілена периферія) використовуються різноманітні промислові мережі, які функціонують на базі великої кількості протоколів. У цьому випадку SCADA/HMI з одного боку і технічний засіб (наприклад контролер) з іншого, повинні підтримувати однаковий протокол (або протоколи) промислової мережі, тому їх вибір проводиться з урахуванням підтримки спільних протоколів та їх можливостей. Найскладнішим є випадок, коли необхідно інтегрувати засоби від декількох виробників, ряд з яких підтримують закриті протоколи. У цій ситуації дуже важко підібрати таку SCADA/HMI-програму, яка б підтримувала всі необхідні протоколи промислових мереж.
Розглянемо, які можливі варіанти реалізації подібної системи.
- Написання спеціального драйверу, якого не існує в SCADA, для забезпечення зв’язку з контролером. Цей варіант потребує залучення програміста досить високого рівня підготовки, наявності відкритого програмного інтерфейсу з боку SCADA-програми та відкритого протоколу обміну з контролером.
- Заміна частини одних контролерів іншими, для яких є драйвери зв’язку. Цей варіант потребує значних капітальних затрат і може бути використаний як виключна міра.
- Використання шлюзів для промислових мереж. Варіант також потребує значних капітальних затрат і не завжди реалізується.
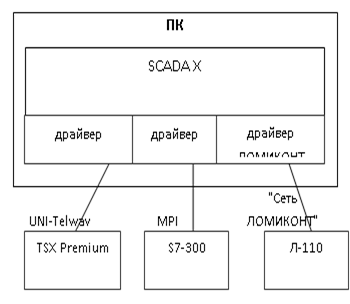 Розглянемо це на наступному прикладі. Припустимо, що існуюча система управління технологічним процесом включає три підсистеми, в кожній із яких використовуються різні за типом і виробником контролеру: TSX Premium (Schneider Electric), S7-300 (Siemens), Ломіконт Л-110 (часів СРСР) (рис.7.1.). Необхідно вибрати SCADA-програму серед трьох варіантів (Citect 7, Zenon 7, Trace Mode 6), яка б забезпечувала зв’язок з усіма підсистемами, враховуючи використання вбудованих комунікацій в ПЛК, та без придбання додаткових конвертуючих програмних засобів.
Розглянемо це на наступному прикладі. Припустимо, що існуюча система управління технологічним процесом включає три підсистеми, в кожній із яких використовуються різні за типом і виробником контролеру: TSX Premium (Schneider Electric), S7-300 (Siemens), Ломіконт Л-110 (часів СРСР) (рис.7.1.). Необхідно вибрати SCADA-програму серед трьох варіантів (Citect 7, Zenon 7, Trace Mode 6), яка б забезпечувала зв’язок з усіма підсистемами, враховуючи використання вбудованих комунікацій в ПЛК, та без придбання додаткових конвертуючих програмних засобів.
При виборі SCADA-програми необхідно перевірити перелік комунікаційних драйверів зв’язку для підтримки вказаних контролерів. Необхідні три типи драйверів: UNI-Telway (для TSX Premium), S7-MPI (для S7-300) та драйвер Сеть Ломиконт (для Л-110).
Протоколи для підключення засобів до SCADA-програми реалізовані у вигляді драйверів зв’язку. Зрозуміло, що інтерфейс драйверів з боку SCADA для кожної реалізації різний, тому драйвери для однієї SCADA-програми не підійдуть для іншої. Тому необхідно вибрати ту, яка має всі три драйвери. Citect 7 та Zenon 6 підтримують всі комунікації, крім Ломіконту. ТМ6 – всі комунікації, однак S7-MPI потребує наявність драйверів SIMATIC NET і має певні обмеження у використанні. Таким чином жодна з перерахованих SCADA-програм не задовольняє вказаним в умові задачі критеріям вибору. Необхідне використання додаткових програм-конверторів, розглянути можливість вибору іншої SCADA, мережі або написання драйверу зв’язку.
Типовим вирішенням такого класу задач є використання стандартної технології OPC, яка універсалізує програмний інтерфейс між драйвером протоколу та SCADA-програмою. Таким чином, будь який драйвер зі стандартним інтерфейсом ОРС може бути використаний будь-якою SCADA-програмою, яка цей інтерфейс підтримує.