Технології інтеграції SCADA/HMI з іншими системами
| Сайт: | Школа автоматики |
| Курс: | SCADA/HMI |
| Книга: | Технології інтеграції SCADA/HMI з іншими системами |
| Напечатано:: | Гость |
| Дата: | Sunday, 14 June 2026, 21:06 |
Проблеми інтеграції SCADA/HMI з іншими системами
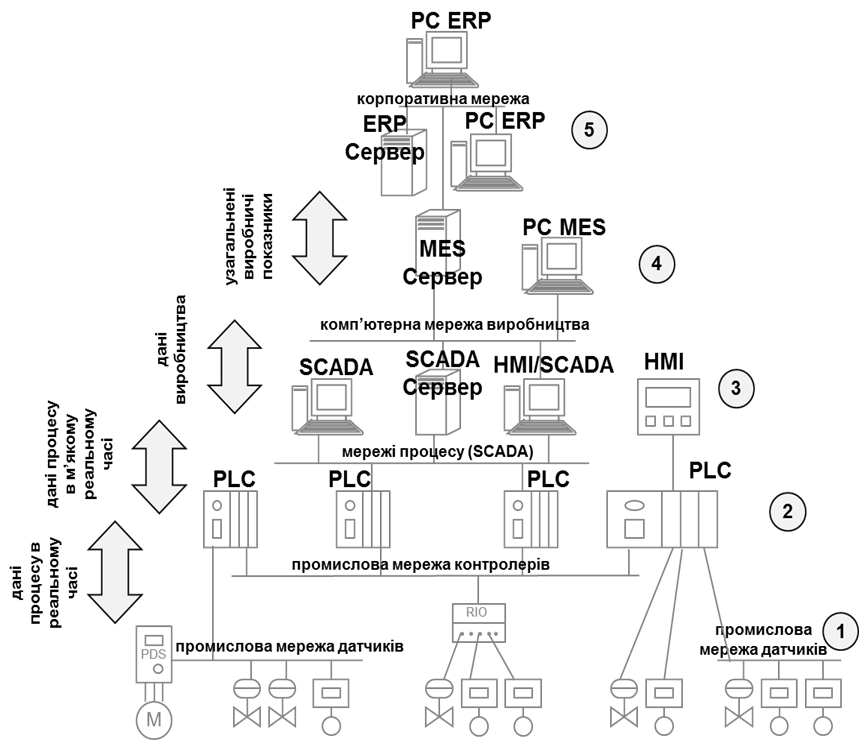
Засоби SCADA/HMI, будучи частиною системи, повинні взаємодіяти з іншими підсистемами, а у випадку розподіленої архітектури SCADA (клієнт-серверна, мультисерверна) взаємодія також повинна проходити між її компонентами. У будь-якому випадку підсистеми (або компоненти) реалізовані як окремі програмні або технічні засоби, для спільної роботи яких необхідні технології міжпрограмної та/або мережної взаємодії. Часто перед розробником та проектувальником системи автоматизації виникає задача у виборі такої технології та її застосування. У найкращому випадку (з точки зору простоти) технологія інтеграції складових прихована від інтегратора. Така ситуація можлива у тому випадку, коли усі складові системи є продуктами одного виробника програмно-технічних засобів, інтеграція яких зводиться до виконання чітких правил без розуміння їх походження. Нажаль, це можливо тільки при використанні продукції великих брендів (Siemens, Schneider Electric, Allen Bradley і т.д.), при умові що вся система розроблена з самого початку з урахуванням єдиної концепції, запропонованої брендом. У інших випадках необхідно вирішувати питання сумісності та налаштування взаємодії вникаючи в подробиці використання вибраних технологій інтеграції. Далі розглянемо проблеми взаємодії засобів SCADA/HMI з різними (під)системами (див. рис. 39), а саме:
- з засобами 1-го (датчиків та розподіленої периферії) та 2-го (контролерів) рівня
- з іншими засобами 3-го рівня (SCADA/HMI)
- з засобами вищих рівнів керування (MES, ERP …)
Взаємодія SCADA/HMI з контролерами та розподіленою периферією
Для доступу до даних рівня керування процесом (рівень 2, контролери, розподілена периферія) використовуються різноманітні промислові мережі, які функціонують на базі великої кількості протоколів. У цьому випадку SCADA/HMI з одного боку і технічний засіб (наприклад контролер) з іншого, повинні підтримувати однаковий протокол (або протоколи) промислової мережі, тому їх вибір проводиться з урахуванням підтримки спільних протоколів та їх можливостей. Найскладнішим є випадок, коли необхідно інтегрувати засоби від декількох виробників, ряд з яких підтримують закриті протоколи. У цій ситуації дуже важко підібрати таку SCADA/HMI-програму, яка б підтримувала всі необхідні протоколи промислових мереж.
Розглянемо, які можливі варіанти реалізації подібної системи.
- Написання спеціального драйверу, якого не існує в SCADA, для забезпечення зв’язку з контролером. Цей варіант потребує залучення програміста досить високого рівня підготовки, наявності відкритого програмного інтерфейсу з боку SCADA-програми та відкритого протоколу обміну з контролером.
- Заміна частини одних контролерів іншими, для яких є драйвери зв’язку. Цей варіант потребує значних капітальних затрат і може бути використаний як виключна міра.
- Використання шлюзів для промислових мереж. Варіант також потребує значних капітальних затрат і не завжди реалізується.
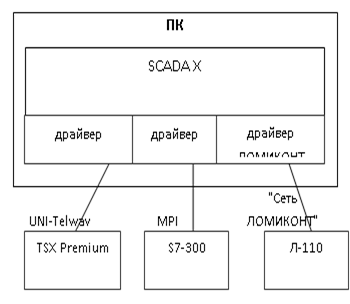 Розглянемо це на наступному прикладі. Припустимо, що існуюча система управління технологічним процесом включає три підсистеми, в кожній із яких використовуються різні за типом і виробником контролеру: TSX Premium (Schneider Electric), S7-300 (Siemens), Ломіконт Л-110 (часів СРСР) (рис.7.1.). Необхідно вибрати SCADA-програму серед трьох варіантів (Citect 7, Zenon 7, Trace Mode 6), яка б забезпечувала зв’язок з усіма підсистемами, враховуючи використання вбудованих комунікацій в ПЛК, та без придбання додаткових конвертуючих програмних засобів.
Розглянемо це на наступному прикладі. Припустимо, що існуюча система управління технологічним процесом включає три підсистеми, в кожній із яких використовуються різні за типом і виробником контролеру: TSX Premium (Schneider Electric), S7-300 (Siemens), Ломіконт Л-110 (часів СРСР) (рис.7.1.). Необхідно вибрати SCADA-програму серед трьох варіантів (Citect 7, Zenon 7, Trace Mode 6), яка б забезпечувала зв’язок з усіма підсистемами, враховуючи використання вбудованих комунікацій в ПЛК, та без придбання додаткових конвертуючих програмних засобів.
При виборі SCADA-програми необхідно перевірити перелік комунікаційних драйверів зв’язку для підтримки вказаних контролерів. Необхідні три типи драйверів: UNI-Telway (для TSX Premium), S7-MPI (для S7-300) та драйвер Сеть Ломиконт (для Л-110).
Протоколи для підключення засобів до SCADA-програми реалізовані у вигляді драйверів зв’язку. Зрозуміло, що інтерфейс драйверів з боку SCADA для кожної реалізації різний, тому драйвери для однієї SCADA-програми не підійдуть для іншої. Тому необхідно вибрати ту, яка має всі три драйвери. Citect 7 та Zenon 6 підтримують всі комунікації, крім Ломіконту. ТМ6 – всі комунікації, однак S7-MPI потребує наявність драйверів SIMATIC NET і має певні обмеження у використанні. Таким чином жодна з перерахованих SCADA-програм не задовольняє вказаним в умові задачі критеріям вибору. Необхідне використання додаткових програм-конверторів, розглянути можливість вибору іншої SCADA, мережі або написання драйверу зв’язку.
Типовим вирішенням такого класу задач є використання стандартної технології OPC, яка універсалізує програмний інтерфейс між драйвером протоколу та SCADA-програмою. Таким чином, будь який драйвер зі стандартним інтерфейсом ОРС може бути використаний будь-якою SCADA-програмою, яка цей інтерфейс підтримує.
Взаємодія компонентів SCADA/HMI між собою та з вищим рівнем
Для узгодженої роботи між собою підсистем SCADA/HMI необхідно забезпечити їх взаємним інформаційним зв’язком. Тут розглянемо декілька задач та способів їх вирішення.
У клієнт-серверних системах необхідна взаємодія термінальних засобів HMI зі SCADA-серверами. Як правило такий зв'язок відбувається за пропрієтарними рішеннями конкретного виробника. Однак у багатьох випадках можуть використовуватися стандартні технології, що дає можливість значно розширити вибір технічних засобів. У цьому випадку найбільш популярними технологіями є:
- OPC, як стандартний механізм доступу HMI-підсистеми до даних реального часу, історичних даних та тривог/подій; у цьому випадку і HMI і SCADA повинні підтримувати цю технологію;
- WEB (http, html…) – який надає можливість доступу до відображення та керування процесом з будь-якого пристрою, який має ВЕБ-браузер; слід звернути увагу, що багато таких рішень базується на технологіях, що дещо обмежують вибір браузеру (наприклад Active X, Java Applet);
Може потребуватися сервер-серверна взаємодія між SCADA. Для такого випадку передбачена технологія OPC, однак можуть використовуватися і інші, такі як DDE, ODBC (SQL), відкритий API (Application Program Interface, відкрита бібліотека для взаємодії з ПЗ SCADA) та ін.
Подібним чином взаємодіють засоби SCADA/HMI з верхніми рівнями управління.